autosar技术规范是一种由汽车开放系统架构联盟制定的开放式标准化平台,旨在促进汽车电子软件的模块化和可重用性,随着汽车电子系统复杂度的不断提升,传统开发模式面临成本高、周期长、维护困难等挑战,而autosar通过分层架构和标准化接口有效解决了这些问题,该技术规范最初发布于2003年,历经多次迭代更新,目前已发展为面向高性能计算(hpc)的autosar adapt平台和面向经典汽车电子控制单元(ecu)的autosar classic平台两大分支,覆盖了从低端传感器到域控制器乃至中央计算单元的全场景应用需求。

autosar的核心架构采用分层设计思想,将系统划分为应用层、基础软件层和运行时环境三个主要层级,应用层由软件组件(swc)构成,这些组件通过端口进行通信,实现了业务逻辑与底层平台的解耦,基础软件层包括微控制器抽象层(mcu abstraction)、存储器抽象层(mem abstraction)、通信抽象层(com abstraction)等模块,负责为上层应用提供标准化的硬件访问接口,运行时环境(rte)作为中间件,负责管理软件组件间的通信调度和事件触发,确保不同厂商开发的组件能够在统一框架下协同工作,这种分层架构使得开发者可以独立更新应用软件或底层驱动,极大提升了系统的可维护性和扩展性。
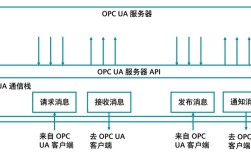
在通信机制方面,autosar定义了多种通信模式以满足不同场景需求,面向信号的通信(scom)通过信号路由表实现信号的端到端传输,适用于需要确定性时序的场合;面向服务的通信(som)基于服务接口调用,支持动态通信拓扑,常用于诊断软件升级等功能;而以太网通信则遵循some/ip协议栈,支持高带宽、低延迟的车载以太网应用,autosar还提供了复杂的时序配置机制,通过调度表、报警监控和看门狗等功能,确保关键任务能够在严格的时间约束内完成,这对于汽车安全完整性等级(asil)达标的系统尤为重要。
autosar技术规范在不同类型的ecu中展现出灵活的适配能力,在动力总成域,autosar classic平台通过可配置的通信栈和驱动模块,实现了发动机控制单元(ecu)的快速开发;在车身控制领域,其低功耗模式和网络管理功能有效降低了待机功耗;而在高级驾驶辅助系统(adas)中,autosar adapt平台通过动态加载机制和异构计算支持,满足了摄像头、雷达等传感器的高实时性处理需求,autosar还提供了丰富的诊断规范,如统一诊断服务(uds)和故障树分析(fta)工具链,帮助开发者高效实现系统故障检测与恢复功能。
autosar的开发流程遵循v模型方法论,包括需求分析、架构设计、组件实现、集成测试等阶段,其配置工具链(如autosar builder)允许开发者通过图形化界面完成复杂参数配置,自动生成代码和描述文件,显著减少了手动编码的工作量,在代码生成方面,autosar支持从模型(如matlab/simulink)或文本描述(如arxml)自动生成符合misra-c标准的代码,确保了代码的安全性和可移植性,autosar生态系统中包含了大量第三方工具和服务,如静态代码分析工具、硬件在环(hil)测试平台等,为汽车电子开发提供了全方位支持。

随着汽车行业向电动化、智能化方向发展,autosar技术规范也在持续演进,autosar adapt平台引入了动态应用载体(dama)和虚拟功能总线(vfb)等新特性,支持面向服务架构(soa)和云原生应用;而autosar classic平台则增强了功能安全(iso 26262)和网络安全(iso/SAE 21434)的支持能力,autosar将与车载操作系统(如posix、posixp)、人工智能框架(如tensorflow lite)等技术深度融合,为自动驾驶、车联网等创新应用提供更强大的技术支撑。
相关问答FAQs:
-
autosar与传统的汽车软件开发模式相比有哪些优势? autosar通过标准化接口和模块化设计,实现了软件组件的可重用性,大幅降低了开发成本和时间,其分层架构使得应用软件与硬件解耦,便于在不同车型间移植代码,autosar提供的自动化工具链和时序配置机制,确保了系统的可靠性和功能安全性,特别适合处理现代汽车电子系统的高复杂度需求。
-
如何选择使用autosar classic还是autosar adapt平台? 选择取决于目标ecu的性能需求和功能复杂度,autosar classic适用于资源受限的传统ecu(如发动机控制、车身模块等),其特点是静态配置、确定性行为;而autosar adapt面向高性能计算平台(如自动驾驶域控制器),支持动态加载、多核并行处理和异构计算,对于需要运行复杂算法或多个并行应用的场景,推荐选择adapt平台;对于实时性要求高但计算资源有限的ecu,classic平台仍是更合适的选择。
 (图片来源网络,侵删)
(图片来源网络,侵删)