无人机技术在航拍、测绘、农业、物流等领域得到广泛应用,但其飞行稳定性受多种因素影响,其中定点GPS漂移是常见问题之一,所谓定点GPS漂移,指无人机在悬停或指定位置保持时,实际位置与目标位置存在偏差,导致机身出现轻微移动或晃动,影响作业精度和飞行安全,这一问题通常由信号干扰、环境因素、设备性能等多重原因导致,需结合具体场景分析并采取针对性解决措施。

从技术原理看,无人机的定点功能依赖GPS/北斗等卫星导航系统提供位置信息,通过飞控系统实时调整电机转速以维持机身稳定,但当卫星信号质量不佳时,飞控无法获取准确坐标,便会出现定位漂移,在城市高楼密集区域,卫星信号易受建筑物遮挡或反射,导致定位误差增大;在电磁环境复杂的区域,如高压电线、无线电发射塔附近,信号可能受到干扰,使无人机接收到错误的卫星数据,无人机自身的硬件问题也会加剧漂移,如GPS模块老化、天线安装角度偏差、飞控算法优化不足等,均可能导致定位响应滞后或修正能力下降。
环境因素是引发GPS漂移的重要外部诱因,天气条件方面,强风、暴雨、雷电等恶劣天气会改变无人机的空气动力学状态,即使飞控持续调整,也可能因外界干扰过大而无法稳定悬停;地理环境方面,大面积水面、沙漠或光滑地表的信号反射特性,可能造成多路径效应,即卫星信号经反射后到达无人机,导致接收器误判信号来源,产生定位偏差,在湖泊或沿海地区作业时,水面反射的卫星信号会与直射信号叠加,使定位数据出现“跳动”,引发无人机位置偏移。
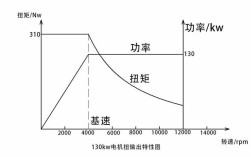
设备性能差异直接决定了GPS漂移的严重程度,不同品牌和型号的无人机,其GPS模块精度、抗干扰能力及飞控算法存在差异,高端机型通常配备双频GPS(L1+L2频段),能通过多频信号校正大气层误差,定位精度可达厘米级;而低端机型多采用单频GPS,在复杂环境下误差可能达米级,无人机的IMU(惯性测量单元)与GPS的协同工作效果也会影响稳定性,若IMU传感器存在零漂误差,或与GPS的融合算法不完善,会导致无人机在卫星信号短暂丢失时(如穿越桥下、树冠),位置修正不及时,出现明显漂移。
针对GPS漂移问题,可通过优化操作环境、升级设备及调整参数等方式缓解,在作业前,应选择开阔、无强电磁干扰的区域,避开高楼、高压线等信号遮挡物;开启无人机的“增强定位模式”(如视觉辅助定位、激光雷达避障等),在GPS信号弱时切换至混合定位模式,提升稳定性,设备维护方面,定期校准GPS模块和IMU传感器,确保天线无遮挡、无损坏;更新飞控固件,厂商通常通过算法优化提升抗干扰能力,对于高精度作业需求,可考虑采用RTK(实时动态差分)技术,通过地面基站提供厘米级定位校正,大幅减少漂移误差。

以下是相关问答FAQs:
Q1:无人机GPS漂移是否会影响飞行安全?
A1:轻微漂移通常不会导致坠机,但若漂移幅度过大(如超过5米),可能引发碰撞风险,在复杂环境中,建议开启“失控保护”功能,并手动接管飞行,避免依赖自动悬停。
Q2:如何判断GPS漂移是信号问题还是设备故障?
A2:可通过对比不同环境下的表现判断:若在开阔区域漂移消失,多为信号干扰;若在所有区域均存在持续漂移,且校准后无改善,则可能是GPS模块或IMU硬件故障,需送检维修。