无人机360度全景制作是一种融合无人机航拍技术与全景图像合成技术的创新视觉呈现方式,通过无人机搭载全景相机或多镜头阵列设备,采集高空多角度图像数据,后期经专业软件拼接、校正与渲染,生成可交互的全景影像,实现地面无法企及的超高视角与360度无死角的沉浸式视觉体验,其制作流程涵盖前期规划、数据采集、后期处理三大核心环节,每个环节的技术细节直接影响最终成片的质量与效果。

在前期规划阶段,需根据拍摄目标确定场景范围与航线参数,景区宣传需重点覆盖核心景观带,房地产项目则需突出建筑全貌及周边配套,航线规划需通过专业软件如DJI GS Pro设定航点,确保重叠度满足全景拼接要求——通常横向重叠率不低于70%,纵向重叠率不低于85%,以避免图像拼接错位,需综合考虑天气因素,优先选择晴朗、无风(风力小于3级)的天气,避免云层遮挡或机身抖动影响画质;需提前核查禁飞区与限飞区,通过民航局UOM系统获取飞行许可,确保合规操作,设备选择方面,消费级无人机如DJI Mavic 3搭载全景云台(如Ricoh Theta X),或专业级无人机如DJI Inspire 2搭配多镜头相机(如Kandao Obsidian Pro),可根据拍摄需求灵活配置——前者适合小范围快速拍摄,后者则能提供更高分辨率(8K以上)与动态范围。
数据采集是全景制作的基础环节,需严格遵循技术规范操作,无人机起飞后,按照预设航线自动巡航,全景相机以每秒2-4张的频率拍摄图像,同时记录GPS坐标、姿态角(俯仰、偏航、滚转)等元数据,为避免图像畸变,需关闭无人机的自动增稳功能(如DJI的“三轴增云”),改用手动控制或航点模式保持匀速飞行;拍摄时需注意光线方向,避免逆光导致高光过曝,可采用包围曝光技术(如-2EV、0EV、+2EV三档曝光)合并HDR图像,提升暗部与亮部细节,拍摄城市全景时,需在日出后1小时或日落前1小时的“黄金时段”进行,此时光线柔和,建筑立面的质感与天空层次感最佳;拍摄森林或山地场景时,需注意避开正午顶光,防止植被出现“死黑”现象,数据采集完成后,需立即检查图像完整性,确保无漏拍、模糊或严重畸变照片,必要时进行补拍。
后期处理是实现全景效果的关键步骤,需借助专业软件完成拼接、优化与交互功能开发,使用PTGui或AutoPano Pro等拼接软件导入原始图像,软件通过特征点匹配(如SIFT、SURF算法)自动对齐图像,并手动调整控制点消除拼接缝;进行色彩校正与色调映射,确保不同镜头拍摄的图像色温、亮度一致,避免出现“花斑”或“色偏”;通过畸变校正(如去除镜头桶形畸变)与透视变换,将图像投影为等矩形(equirectangular)投影格式,实现360度视角无缝衔接,使用Kolor Panotour或Pano2VR等交互软件添加热点、语音导览、信息弹窗等功能,例如在景区全景中标注景点名称与历史介绍,在房产全景中嵌入户型图与周边配套链接,提升用户交互体验,若需实现VR效果,可输出为Oculus Rift或HTC Vive支持的格式,搭配头显设备实现沉浸式体验。
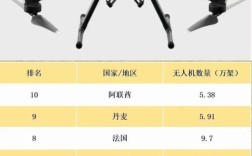
无人机360度全景制作的技术优势显著,尤其在复杂场景中表现突出,与地面全景拍摄相比,无人机视角可突破地形限制,如拍摄峡谷、海岛等地面无法到达的区域,同时避免地面拍摄常见的透视畸变(如建筑物倾斜);与传统航拍视频相比,全景制作允许用户自主选择视角,随意缩放与旋转,信息密度更高,且文件体积更小(经压缩的全景视频仅占同等时长视频的1/10左右),据行业数据显示,采用无人机全景制作的房地产项目,客户停留时长平均增加3.5倍,景区门票转化率提升20%以上,充分验证了其在商业领域的应用价值。

| 环节 | 关键技术要点 | 常见问题与解决方案 |
|---|---|---|
| 前期规划 | 航线重叠率(横向≥70%,纵向≥85%) | 航线偏移:采用GPS+视觉双定位系统纠偏 |
| 天气选择(晴朗、风力<3级) | 突发天气:实时监测气象数据,预留备用拍摄日 | |
| 禁飞区核查(民航局UOM系统) | 临近限飞区:申请临时飞行许可,调整航高至120米以上 | |
| 数据采集 | 图像重叠率与曝光包围 | 漏拍:设置航点间重叠预警,自动返航补拍 |
| 姿态角控制(关闭自动增稳) | 机身抖动:使用减震云台,飞行速度≤5m/s | |
| 黄金时段拍摄(日出后1小时/日落前1小时) | 光线不均:采用多张HDR合并技术 | |
| 后期处理 | 特征点匹配与拼接缝消除 | 色彩差异:手动调整白平衡与伽马曲线 |
| 等矩形投影与畸变校正 | 透视变形:控制拍摄高度与距离比例(建议高度:距离=1:3) | |
| 交互功能开发(热点、导览) | 文件过大:采用自适应码率流媒体传输技术 |
相关问答FAQs
Q1:无人机全景拍摄对设备有哪些要求?是否必须使用专业全景相机?
A1:无人机全景拍摄对设备的核心要求包括:①无人机需具备精准的GPS定位与姿态控制系统,建议选择DJI Mavic 3以上机型;②相机支持手动曝光与RAW格式拍摄,若使用普通单反相机,需搭配全景云台(如Nodal Ninja)确保旋转轴心准确;③专业全景相机(如Kandao Obsidian Pro)虽非必需,但能简化拍摄流程(内置自动曝光与拼接算法),适合新手快速上手,对于高分辨率需求(如8K以上),建议使用多镜头相机;若仅需2K-4K分辨率,消费级全景相机(如Insta360 Pro II)已能满足多数场景需求。
Q2:全景影像拼接失败或出现错位,可能的原因及解决方法是什么?
A2:拼接失败或错位的主要原因包括:①图像重叠率不足(横向<70%或纵向<85%),需重新规划航线,增加航点密度;②拍摄过程中无人机姿态剧烈变化(如急转弯或突风干扰),建议采用匀速直线飞行模式,关闭自动增稳功能改用手动控制;③场景中存在动态物体(如行人、车辆),需选择场景静止时段拍摄,或使用Photoshop的“内容识别填充”工具后期去除动态元素;④镜头畸变未校正,可在拼接前使用Lens Profile数据库导入镜头参数进行预校正,若仍无法解决,可尝试使用PTGui的“控制点手动添加”功能,在图像重叠区域标记至少10个特征点,强制对齐图像。