为什么选择在无人机上安装Jetson TX2?
- 强大的AI算力: Jetson TX2拥有256个NVIDIA CUDA核心,其性能足以在机载环境下运行复杂的深度学习模型(如YOLO, SSD等),实现实时目标检测、分类和跟踪。
- 边缘计算: 无需将所有图像数据传回地面站进行计算,直接在无人机上处理,大大降低了通信延迟和带宽需求,实现了真正的实时决策。
- 高扩展性: Linux系统(基于Ubuntu)提供了极大的灵活性,您可以自由安装各种AI框架(TensorFlow, PyTorch, OpenCV等)和自定义软件。
- 丰富的接口: 提供USB、CSI、GPIO等多种接口,方便连接摄像头、传感器等外设。
典型应用场景:
- 智能巡检: 自动识别电力线路、风力发电机、桥梁的缺陷。
- 精准农业: 识别作物长势、病虫害、杂草。
- 安防监控: 自动追踪特定目标(如人、车)。
- 物流配送: 实现更智能的降落和避障。
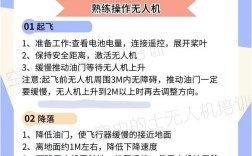
准备工作
在开始安装之前,您需要准备好以下所有硬件和软件。
硬件清单
| 类别 | 具体组件 | 说明 |
|---|---|---|
| 核心计算单元 | NVIDIA Jetson TX2 模块 | 您的AI大脑,可以是开发者套件或定制板。 |
| TX2 开发板底座 | 为TX2模块提供供电、散热和接口扩展。 | |
| 无人机平台 | 四旋翼无人机机架 | 建议 X型 或 H型 机架,便于安装和配重。 |
| 飞行控制器 | 强烈推荐Pixhawk系列 (如Pixhawk 4, CubePilot),它负责飞行控制,与TX2通过串口通信。 | |
| 电机和电调 | 根据无人机大小和载重选择。 | |
| 螺旋桨 | 匹配电机。 | |
| 机载电池 | 高倍率(如C25/C50)的锂聚合物电池,提供足够电流。 | |
| GPS模块 | 提供位置信息,用于自主导航。 | |
| 电源系统 | DC-DC 降压模块 | 至关重要! 将电池电压(如S 6S ~ 22.2V)稳定降压为TX2所需的12V。 |
| 电源分配板 | 将电池电压分配给飞控、电调、TX2等。 | |
| 电容 | 并联在电源输入端,滤除电机噪声,防止TX2重启。 | |
| 通信与传感器 | 数传电台 | 用于TX2与地面站之间的无线通信(如WiFi, 4G, 专用数传)。 |
| 机载摄像头 | CSI摄像头 (如Raspberry Pi Camera V2) 性能最佳,直接连接TX2的MIPI CSI-2接口,USB摄像头也可用,但性能和延迟较差。 | |
| 图传系统 | 将摄像头画面实时传回地面站,方便监视和调试。 | |
| 散热系统 | 散热片/主动散热风扇 | TX2在高负载下发热严重,必须做好散热,否则会降频甚至关机。 |
| 固定与线材 | 扎带、魔术贴、支架 | 固定TX2、飞控、摄像头等。 |
| 杜邦线、XT60插头等 | 连接各组件。 |
软件准备
- Jetson TX2系统镜像:
- 从NVIDIA官网下载适用于Jetson TX2的L4T (Linux for Tegra) 镜像,推荐使用较新的稳定版本。
- 刷写工具:
Linux_for_Tegra工具包。
- 地面站软件:
- QGroundControl (QGC): 强烈推荐,它集成了MAVLink协议,可以方便地与飞控和TX2进行通信,进行参数设置、航线规划等。
- AI开发环境:
在TX2上安装Docker,可以轻松部署各种AI框架和环境,避免与系统冲突。
安装步骤详解
安装过程可以分为三个主要部分:硬件安装、软件配置和系统集成。
步骤1:硬件安装与接线
这是最关键也最容易出错的一步。务必在断电状态下操作!
-
规划布局:

- 将TX2模块和其底座牢固地安装在无人机机架的上层或中心位置,确保重心稳定。
- 将飞控安装在TX2下方或旁边,确保其IMU(惯性测量单元)远离电机和电调,避免电磁干扰。
- 将摄像头安装在无人机前方,视野开阔。
- 重心!重心!重心! 确保所有部件安装后,无人机的重心位于几何中心,否则飞行会非常困难。
-
连接电源:
- 电池 -> PDB (电源分配板)
- PDB -> 飞控: 通过一个BEC(稳压模块)为飞控提供5V或6V电压。
- PDB -> DC-DC降压模块: 将电池高压(如22.2V)输入到降压模块。
- DC-DC降压模块 -> TX2底座: 将输出电压调整为12V,为TX2供电。
- 并联电容: 在TX2的电源输入端并联一个大电容(如1000uF以上),可以有效吸收电机启动和切换时产生的电流尖峰,防止TX2复位。
-
连接通信与控制:

- 飞控 -> 数传电台: 通过串口(如TELEM1/TELEM2)连接,用于飞控与地面站的通信。
- 飞控 -> TX2: 这是AI与飞控协同工作的核心!
- 首选方案:串口通信。 使用USB转TTL模块,将飞控的一个串口(如TELEM2)连接到TX2的USB口,两者通过 MAVLink协议 通信,TX2作为“机载计算机”,通过MAVLink向飞控发送高级指令(如“前往指定坐标”、“跟踪目标”),飞控则执行底层飞行控制。
- 次选方案:直接串口。 如果TX2底座有串口,可以直接连接。
- 摄像头 -> TX2:
- CSI摄像头: 使用专用排线连接到TX2底座的CSI接口。
- USB摄像头: 直接插入TX2的USB口。
-
连接图传:
将摄像头(或单独的图传摄像头)的视频输出连接到图传发射器,图传发射器再连接到机载电池,地面端接收器连接显示器或地面站电脑。
步骤2:软件配置
-
刷写Jetson TX2系统:
- 将下载的L4T镜像通过
dd命令写入microSD卡。 - 将SD卡插入TX2底座,连接键盘、鼠标、显示器和网线。
- 按照官方教程启动并完成初始设置(设置用户名、密码、网络等)。
- 强烈建议:刷写系统后,立即更新系统和所有驱动。
- 将下载的L4T镜像通过
-
配置MAVLink通信(核心步骤):
- 在TX2上:
- 安装
mavlink库:pip install pymavlink - 编写一个Python脚本,使用
pymavlink库通过串口连接飞控,这个脚本将作为你的AI应用与飞控之间的桥梁。 - 一个简单的脚本可以不断接收飞控发来的位置信息,或者向飞控发送
SET_POSITION_TARGET_LOCAL_NED命令来控制无人机移动。
- 安装
- 在QGroundControl上:
- 连接无人机,进入"参数"设置。
- 找到与串口相关的参数(如
SERIAL1,SERIAL2),确保:SERIAL1_PROTOCOL = 2(MAVLink 1) 或3(MAVLink 2)。MAV_1_CONFIG = TELEM 2(或你实际使用的串口)。- 设置正确的波特率(如
57600或921600)。
- 在"
- 在TX2上: