当然可以!Arduino不仅可以用来制作无人机,而且是DIY无人机领域非常核心和流行的控制器。

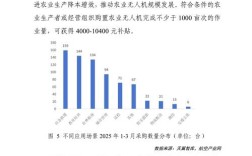
(图片来源网络,侵删)
用Arduino做无人机是一个经典的、极具教育意义和DIY乐趣的项目,下面我将从几个方面详细解释:
为什么选择Arduino做无人机?
- 开源与生态丰富:Arduino是开源的,这意味着所有硬件设计、代码和教程都是公开的,你可以找到无数的开源飞控固件(如ArduPilot、MultiWii),以及海量的教程、社区支持。
- 学习价值极高:制作无人机的过程会让你深入理解嵌入式系统、传感器融合(陀螺仪、加速度计、磁力计)、PID控制算法、电机控制、无线电通信等硬核知识,这是将理论知识付诸实践的绝佳途径。
- 高度可定制化:你可以根据需求选择不同型号的Arduino主板(如Uno, Nano, Mega 2560),并自由搭配传感器、GPS模块、图传系统等,打造独一无二的无人机。
- 成本相对较低:相比于直接购买成品飞控(如Pixhawk, Holybro),自己用Arduino搭建的成本更低,对于预算有限的DIY爱好者非常有吸引力。
Arduino在无人机中扮演什么角色?
在无人机中,Arduino通常作为飞控的核心,飞控是无人机的“大脑”,负责:
- 感知姿态:通过陀螺仪、加速度计和磁力计(通常集成在一个叫做IMU的模块里,如MPU-6050)来感知无人机当前的飞行姿态(俯仰、横滚、偏航)。
- 接收指令:通过无线接收机接收来自遥控器的指令(如油门、副翼、升降、方向舵)。
- 核心控制算法:运行PID控制算法,这是飞控的灵魂,它会比较“你想要的姿态”(来自遥控器指令)和“无人机实际的姿态”(来自IMU),然后计算出需要给电机多大的动力差,来纠正偏差,保持稳定飞行。
- 输出控制信号:根据PID计算结果,通过电调控制无刷电机的转速,从而改变螺旋桨的推力,实现无人机的稳定悬停、升降、转向等动作。
制作一个Arduino无人机需要哪些核心部件?
一个最基本的DIY无人机系统包括:
| 部件名称 | 作用 | 备注 |
|---|---|---|
| Arduino主控板 | 大脑,运行核心控制代码 | 常用 Arduino Nano 或 Arduino Pro Mini,因为体积小、功耗低。 |
| IMU传感器 | 感知姿态(平衡和方向) | 最经典的是 MPU-6050(集成了陀螺仪和加速度计),有时会外接一个 HMC5883L 磁力计来指北。 |
| 电调 | 连接飞控和电机,接收飞控指令并控制电机转速 | 需要与电机匹配(如2S/3S/4S电调),并支持PWM信号输入。 |
| 无刷电机 | 提供动力 | 需要根据无人机的尺寸和重量选择KV值和尺寸合适的电机。 |
| 螺旋桨 | 旋转产生推力 | 分正桨和反桨,需要与电机匹配,并正确安装在电机上。 |
| 电池 | 提供能源 | 通常是 锂聚合物电池,如3S 1S或2S,电压和容量需根据电机和电调选择。 |
| 遥控器和接收机 | 手动控制无人机 | 遥控器发出信号,接收机接收并解码成PWM信号传给飞控。 |
| 机架 | 骨架,用来固定所有部件 | 可以是3D打印的,也可以是购买现成的碳纤维或塑料机架。 |
| (可选)GPS模块 | 提供位置信息 | 用于实现自动悬停、自动返航、航点飞行等高级功能。 |
从零到一的简单步骤
- 准备硬件:购买上述所有部件。
- 组装机架:将电机、电调、飞控板等固定在机架上。
- 连接线路:
- 将电调的信号线连接到Arduino的PWM引脚。
- 将IMU模块通过I2C接口连接到Arduino。
- 将接收机的通道线连接到Arduino的PWM引脚。
- 将电池连接到电调上。
- 烧录飞控固件:这是最关键的一步,你不能从零开始写所有代码,你需要下载一个成熟的、基于Arduino的开源飞控固件,
- ArduPilot:功能极其强大,支持多旋翼、固定翼、直升机等,支持全自主飞行,学习曲线稍陡,但功能最全面。
- MultiWii:一个非常经典、轻量级的固件,专注于多旋翼的稳定飞行,非常适合初学者。
- Cleanflight / Betaflight:虽然它们是为专门的F3/F4飞控芯片设计的,但也有社区移植到Arduino的版本,以卓越的性能和丰富的调参功能著称。
- 配置与调试:通过地面站软件(如Mission Planner for ArduPilot, or Configurator for Cleanflight)配置你的无人机参数,最重要的就是PID参数整定,这是决定你的无人机能否平稳飞行的关键,通常需要花费大量时间进行反复调试。
- 试飞:在空旷、安全的地方进行小油量试飞,并随时准备紧急切断电源!
挑战与建议
- 挑战:
- PID调参:这是最大的难点,参数不合适,无人机就会像“醉汉”一样上下翻飞,无法稳定。
- 硬件连接:线路繁多,接错一个线可能导致电机不转甚至烧毁设备。
- 安全风险:DIY无人机动力强劲,如果失控可能造成人身伤害或财产损失。
- 建议:
- 从模仿开始:不要自己从零写代码,直接使用成熟的开源固件。
- 从小做起:先从最小的250mm轴距的四旋翼开始,成本和风险都更低。
- 加入社区:多逛DIY无人机论坛(如RCGroups)、QQ群,遇到问题多搜索,你会发现很多人都遇到过同样的问题。
- 安全第一:务必在远离人群和障碍物的空旷场地试飞,并准备好紧急停机措施。
Arduino完全可以做无人机,而且是一个能让你学到非常多知识的绝佳项目。

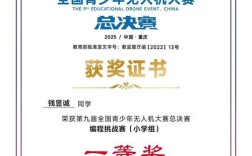
(图片来源网络,侵删)
虽然对于只想快速拥有无人机的人来说,直接购买集成了成熟飞控的机架(如DJI的FPV机架或Holybro的Pixhawk系列)是更简单、更可靠的选择,但对于电子、编程和航模爱好者来说,用Arduino亲手打造一架属于自己的无人机,那种成就感和获得的宝贵经验是无可比拟的。

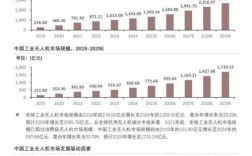
(图片来源网络,侵删)